




 Qzone
Qzone
 微博
微博
 微信
微信


2月5日,小鹏汽车旗下广州小鹏自动驾驶科技有限公司公开“一种基于超声波雷达的探测方法、装置和车辆”专利,该专利于2020年11月4日申请,申请公布号为CN112327307A。
根据该专利背景技术,具备自动驾驶功能的车辆中,通常设置有超声波雷达,通过超声波雷达对行驶行驶环境的检测,例如进行车位边缘信息的检测,从而基于车位边缘信息虚拟生成车位的车位信息,从而可以基于车位信息生成泊车路径进行泊车。
在泊车过程中会持续采用超声波雷达进行车位边缘信息检测,从而调整泊车路径,但是由于在车辆进入车位(入库)过程中,超声波雷达的探测缺乏方向性,其默认探测点位置的位置为正对着超声波雷达的方向,由于一般入库的情况下,车辆需要不断调整角度和位置以驶入车位,因此车辆与车位之间的夹角总是在不断变化,超声波雷达的真实探测回波可能是来自不同角度的放射波,如果默认为正对着超声波雷达的方向的回波为探测点位置,则会导致超声波雷达检测障碍物的边缘出现较大的误差,造成虚拟车位形状与实际车位形状不符,从而影响泊车路径的生成,可能会使得车辆最终泊车位置靠近于车位一侧或直接泊车中止。在超声波雷达的探测点位置的位置误差较大时,影响了障碍物的探测结果,进而影响驾驶员的驾驶体验。
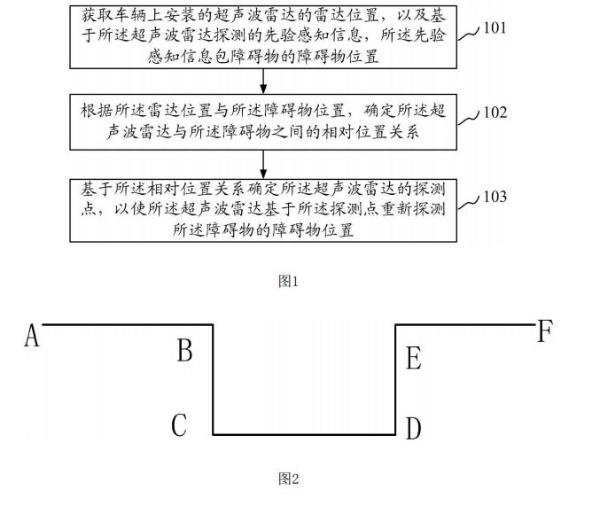
根据专利摘要,本发明实施例提供了一种基于超声波雷达的探测方法和车辆,所述方法包括:获取车辆上安装的超声波雷达的雷达位置,以及基于所述超声波雷达探测的先验感知信息,所述先验感知信息包括障碍物的障碍物位置;根据所述雷达位置与所述障碍物位置,确定所述超声波雷达与所述障碍物之间的相对位置关系;基于所述相对位置关系确定所述超声波雷达的探测点位置,以使所述超声波雷达基于所述探测点位置重新探测所述障碍物的障碍物位置。
在本发明实施例中,基于超声波雷达和障碍物之间的相对位置关系调整超声波雷达的探测点位置,从而基于调整后的探测点位置重新探测障碍物的障碍物位置,提高行车安全性,且提高了驾驶员的驾驶体验。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)

泡泡网2022-05-24 19:4805-24 19:48

南方娱乐网2022-05-24 19:2405-24 19:24

猎云网2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5505-24 17:55

TOM2022-05-24 17:5505-24 17:55

TOM2022-05-24 17:5505-24 17:55






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>





















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报